forked from andrey/raspberry-pi-pico-docker-sdk
Compare commits
17 Commits
container-
...
v0.0.2
| Author | SHA1 | Date | |
|---|---|---|---|
|
|
7269f053f6 | ||
|
|
4457cf9404 | ||
|
|
3d8b06e9b7 | ||
|
|
ee42c6f1df | ||
|
|
ecea0809ad | ||
|
|
17a8f90fef | ||
|
|
ad8789bee0 | ||
|
|
ac4a91fe9c | ||
|
|
8330c3c482 | ||
|
|
fb5f876583 | ||
|
|
b874fd5682 | ||
|
|
9181e64866 | ||
|
|
4043da22f1 | ||
|
|
90483caaef | ||
|
|
989cd790e4 | ||
|
|
1f37ffef34 | ||
|
|
b067ae75eb |
47
.github/workflows/sdk-ci.yml
vendored
Normal file
47
.github/workflows/sdk-ci.yml
vendored
Normal file
@@ -0,0 +1,47 @@
|
|||||||
|
name: Raspberry PI Pico Docker SDK CI
|
||||||
|
|
||||||
|
on:
|
||||||
|
push:
|
||||||
|
branches:
|
||||||
|
- main
|
||||||
|
pull_request:
|
||||||
|
branches:
|
||||||
|
- main
|
||||||
|
release:
|
||||||
|
types: [published]
|
||||||
|
|
||||||
|
env:
|
||||||
|
TEST_TAG: pico_test_sdk
|
||||||
|
|
||||||
|
jobs:
|
||||||
|
sdk_container:
|
||||||
|
runs-on: ubuntu-latest
|
||||||
|
steps:
|
||||||
|
- name: Checkout
|
||||||
|
uses: actions/checkout@v3
|
||||||
|
- name: Build SDK
|
||||||
|
uses: docker/build-push-action@v4
|
||||||
|
with:
|
||||||
|
context: .
|
||||||
|
load: true
|
||||||
|
tags: ${{ env.TEST_TAG }}
|
||||||
|
- name: Test SDK
|
||||||
|
run: bash ./test_sdk.sh ${{ env.TEST_TAG }}
|
||||||
|
- name: Log into Docker Hub
|
||||||
|
uses: docker/login-action@v2
|
||||||
|
with:
|
||||||
|
username: ${{ github.actor }}
|
||||||
|
password: ${{ secrets.DOCKER_HUB_TOKEN }}
|
||||||
|
- name: Extract SDK metadata
|
||||||
|
id: meta
|
||||||
|
uses: docker/metadata-action@v4
|
||||||
|
with:
|
||||||
|
images: lukstep/raspberry-pi-pico-sdk
|
||||||
|
- name: Push SDK image
|
||||||
|
if: github.event_name == 'release' && github.event.action == 'published'
|
||||||
|
uses: docker/build-push-action@v4
|
||||||
|
with:
|
||||||
|
context: .
|
||||||
|
push: true
|
||||||
|
tags: ${{ steps.meta.outputs.tags }}
|
||||||
|
labels: ${{ steps.meta.outputs.labels }}
|
||||||
@@ -1,4 +1,4 @@
|
|||||||
FROM alpine:3.16.2
|
FROM alpine:3.17.0
|
||||||
|
|
||||||
# Install toolchain
|
# Install toolchain
|
||||||
RUN apk update && \
|
RUN apk update && \
|
||||||
@@ -14,15 +14,23 @@ RUN apk update && \
|
|||||||
gcc-arm-none-eabi
|
gcc-arm-none-eabi
|
||||||
|
|
||||||
# Raspberry Pi Pico SDK
|
# Raspberry Pi Pico SDK
|
||||||
ARG SDK_PATH=/usr/share/pico_sdk
|
ARG SDK_PATH=/usr/local/picosdk
|
||||||
RUN git clone https://github.com/raspberrypi/pico-sdk $SDK_PATH && \
|
RUN git clone --depth 1 --branch 1.5.1 https://github.com/raspberrypi/pico-sdk $SDK_PATH && \
|
||||||
cd $SDK_PATH && \
|
cd $SDK_PATH && \
|
||||||
git submodule update --init
|
git submodule update --init
|
||||||
|
|
||||||
ENV PICO_SDK_PATH=$SDK_PATH
|
ENV PICO_SDK_PATH=$SDK_PATH
|
||||||
|
|
||||||
|
# FreeRTOS
|
||||||
|
ARG FREERTOS_PATH=/usr/local/freertos
|
||||||
|
RUN git clone --depth 1 --branch V11.0.1 https://github.com/FreeRTOS/FreeRTOS-Kernel $FREERTOS_PATH && \
|
||||||
|
cd $FREERTOS_PATH && \
|
||||||
|
git submodule update --init --recursive
|
||||||
|
|
||||||
|
ENV FREERTOS_KERNEL_PATH=$FREERTOS_PATH
|
||||||
|
|
||||||
# Picotool installation
|
# Picotool installation
|
||||||
RUN git clone -b master https://github.com/raspberrypi/picotool.git /home/picotool && \
|
RUN git clone --depth 1 --branch 1.1.2 https://github.com/raspberrypi/picotool.git /home/picotool && \
|
||||||
cd /home/picotool && \
|
cd /home/picotool && \
|
||||||
mkdir build && \
|
mkdir build && \
|
||||||
cd build && \
|
cd build && \
|
||||||
21
LICENSE
Normal file
21
LICENSE
Normal file
@@ -0,0 +1,21 @@
|
|||||||
|
MIT License
|
||||||
|
|
||||||
|
Copyright (c) 2022 lukstep
|
||||||
|
|
||||||
|
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||||
|
of this software and associated documentation files (the "Software"), to deal
|
||||||
|
in the Software without restriction, including without limitation the rights
|
||||||
|
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||||
|
copies of the Software, and to permit persons to whom the Software is
|
||||||
|
furnished to do so, subject to the following conditions:
|
||||||
|
|
||||||
|
The above copyright notice and this permission notice shall be included in all
|
||||||
|
copies or substantial portions of the Software.
|
||||||
|
|
||||||
|
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||||
|
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||||
|
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||||
|
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||||
|
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||||
|
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||||
|
SOFTWARE.
|
||||||
128
README.md
128
README.md
@@ -1,18 +1,23 @@
|
|||||||
|
[](https://github.com/lukstep/raspberry-pi-pico-docker-sdk/actions/workflows/sdk-ci.yml)
|
||||||
|
|
||||||
# Raspberry Pi Pico Docker SDK
|
# Raspberry Pi Pico Docker SDK
|
||||||
|
|
||||||
## Run Docker container
|
Lightweight Raspberry Pi Pico C++ SDK container.
|
||||||
|
|
||||||
|
## Pull container from Docker Hub and run
|
||||||
|
|
||||||
|
The latest version of the image is stored on [Docker Hub](https://hub.docker.com/repository/docker/lukstep/raspberry-pi-pico-sdk/general)
|
||||||
|
and can be used for container runs.
|
||||||
|
Commands below show how to run a container, using an image from Docker Hub
|
||||||
```
|
```
|
||||||
docker build ./docker --tag pico-sdk
|
docker run -d -it --name pico-sdk --mount type=bind,source=${PWD},target=/home/dev lukstep/raspberry-pi-pico-sdk:latest
|
||||||
|
|
||||||
docker run -d -it --name pico-sdk --mount type=bind,source=${PWD},target=/home/dev pico-sdk
|
|
||||||
|
|
||||||
docker exec -it pico-sdk /bin/sh
|
docker exec -it pico-sdk /bin/sh
|
||||||
```
|
```
|
||||||
|
|
||||||
## Project build
|
The directory from which the `docker run` command was called will be mounted to /home/dev in the container.
|
||||||
|
So after attaching to the SDK container you can build your project following the steps:
|
||||||
|
|
||||||
After attaching to SDK container run the following command to build the project:
|
|
||||||
```
|
```
|
||||||
cd /home/dev
|
cd /home/dev
|
||||||
|
|
||||||
@@ -21,5 +26,116 @@ mkdir build
|
|||||||
cd build
|
cd build
|
||||||
|
|
||||||
cmake .. && make -j4
|
cmake .. && make -j4
|
||||||
|
```
|
||||||
|
|
||||||
|
## Build image and run container:
|
||||||
|
|
||||||
|
To build your own SDK image, You need to clone this repository and run the following commands:
|
||||||
|
|
||||||
```
|
```
|
||||||
|
cd raspberry-pi-pico-docker-sdk
|
||||||
|
|
||||||
|
docker build . --tag pico-sdk
|
||||||
|
|
||||||
|
docker run -d -it --name pico-sdk --mount type=bind,source=${PWD},target=/home/dev pico-sdk
|
||||||
|
|
||||||
|
docker exec -it pico-sdk /bin/sh
|
||||||
|
```
|
||||||
|
|
||||||
|
## Visual Studio Code as Rassberry Pi PICO projects IDE
|
||||||
|
|
||||||
|
You can use the SDK container with Visual Studio Code as Raspberry Pi Pico projects IDE.
|
||||||
|
|
||||||
|
### Attaching VSCode to SDK Docker container
|
||||||
|
|
||||||
|
Follow the instruction below to set up VSCode:
|
||||||
|
|
||||||
|
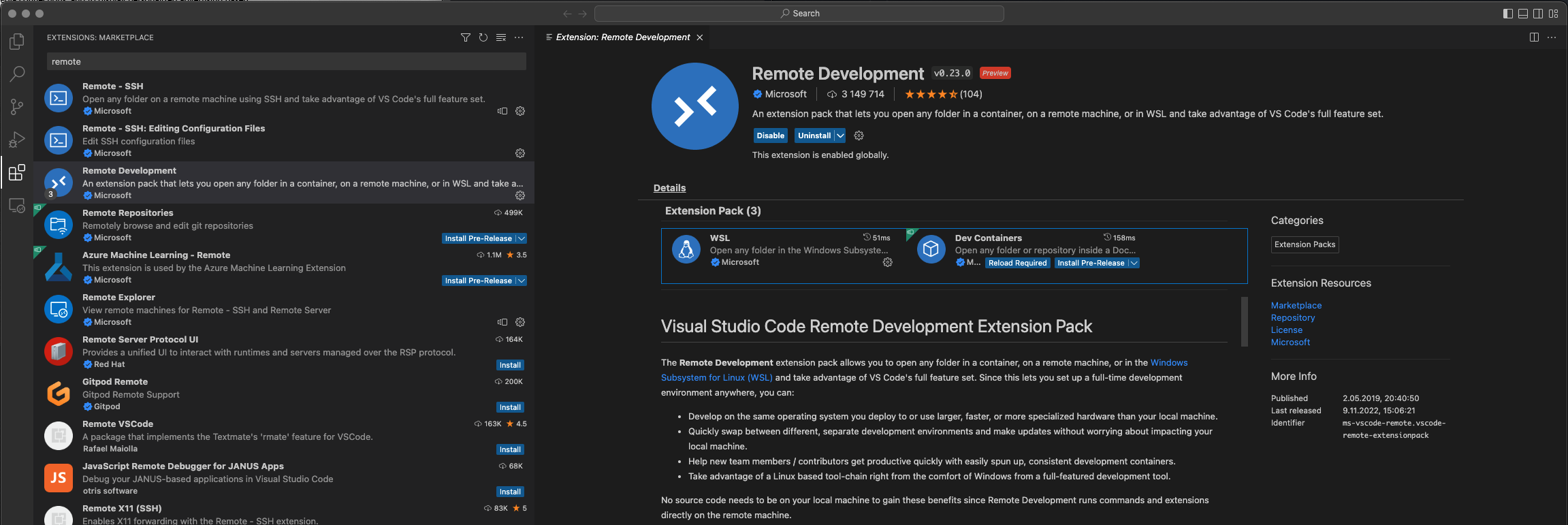
1. Install [Visual Studio Code](https://code.visualstudio.com) and next [Remote Development](https://marketplace.visualstudio.com/items?itemName=ms-vscode-remote.vscode-remote-extensionpack) extensions.
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
2. Open the terminal and go to the projects you want to open in VSCode.
|
||||||
|
|
||||||
|
3. Pull SDK image from Docker HUB and run SDK container via the following command. The container must be running while you attach to it via VSCode.
|
||||||
|
|
||||||
|
```
|
||||||
|
docker run -d -it --name pico-sdk --mount type=bind,source=${PWD},target=/home/dev lukstep/raspberry-pi-pico-sdk:latest
|
||||||
|
|
||||||
|
docker exec -it pico-sdk /bin/sh
|
||||||
|
```
|
||||||
|
|
||||||
|
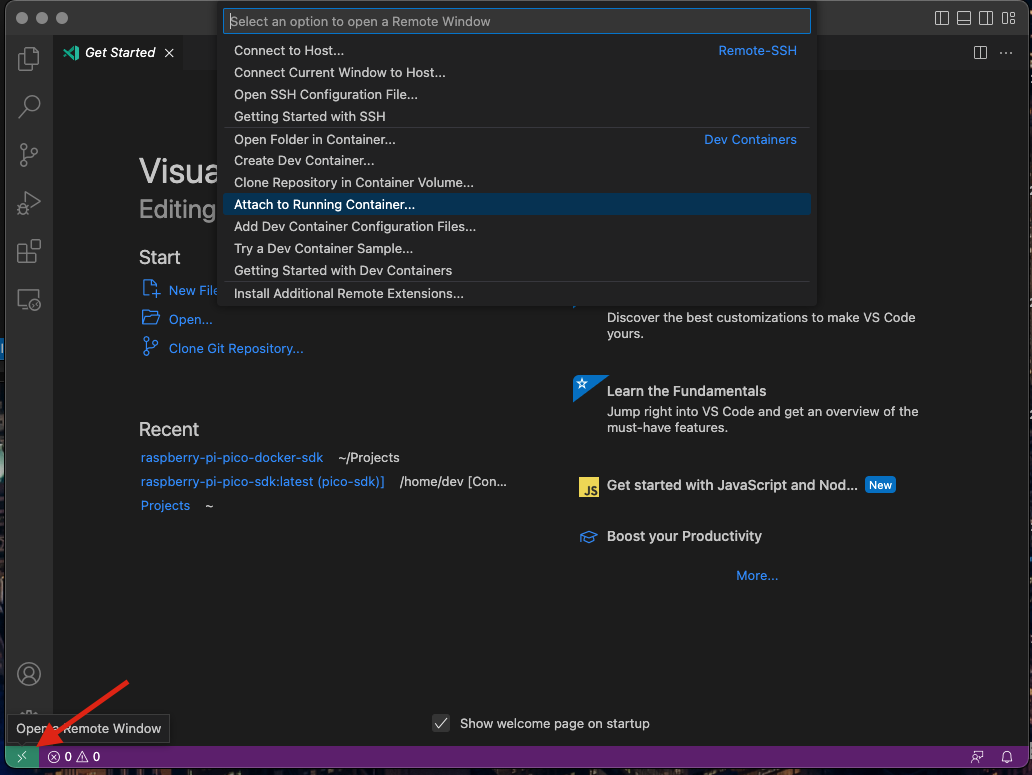
4. When the container is launched, go to VSCode, click the green button in the lower left corner of VSCode and select options: Attach to Running Container...
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
5. Select the SDK container.
|
||||||
|
|
||||||
|

|
||||||
|
|
||||||
|
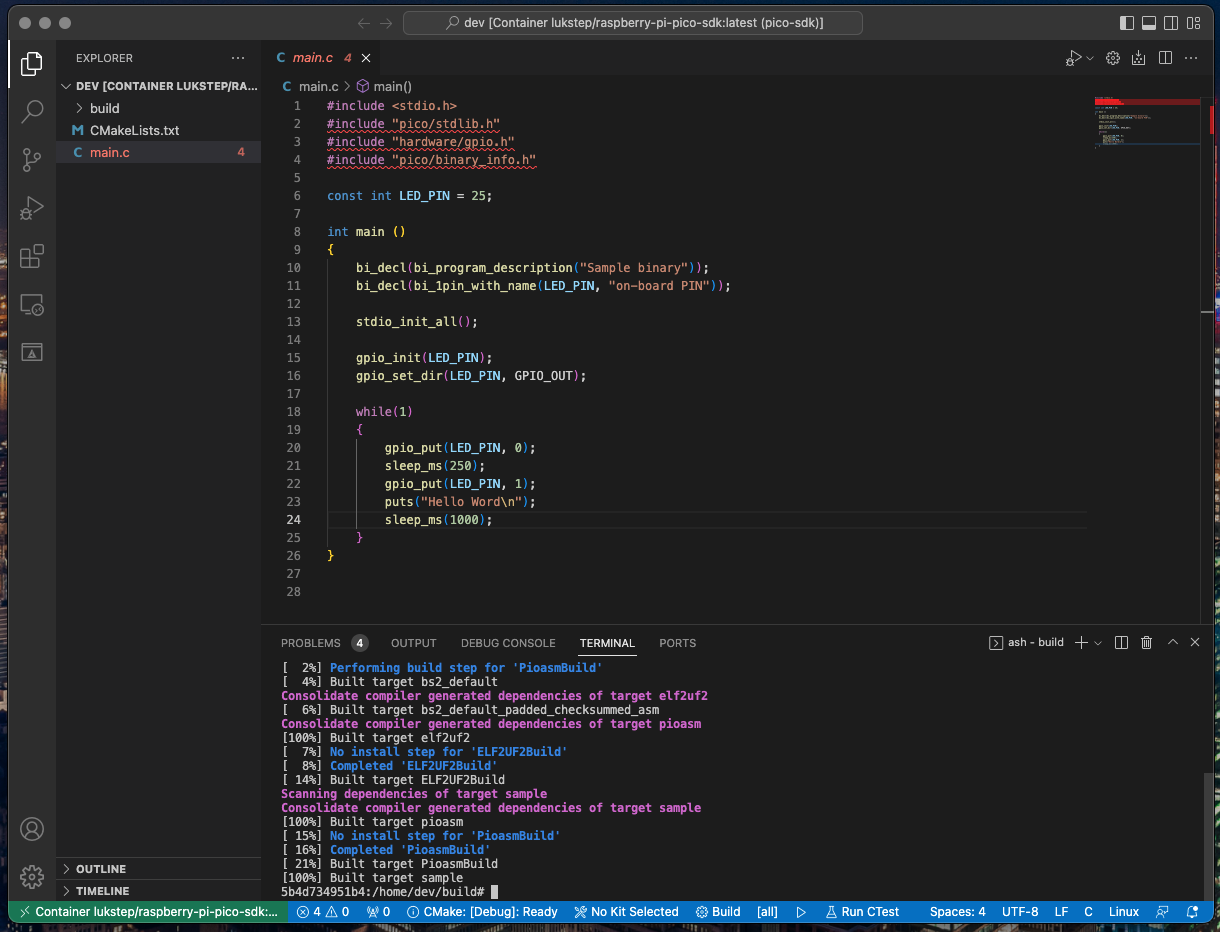
6. Then a new VSCode window will open. At the bottom window, you can see that it is attached to the SDK container.
|
||||||
|
|
||||||
|

|
||||||
|
|
||||||
|
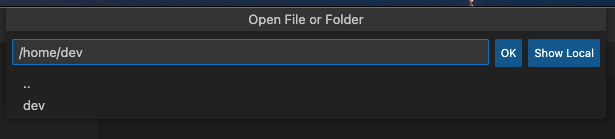
7. Now, there is needed to open project files. Your project is mounted to `/home/dev` in the container. Go to EXPLORE tab in VSCode and click Open Folder. In opened window write `/home/dev` and click the OK button.
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
8. Now You can explore, develop and build your Raspberry Pi Pico project via Visual Studio Code!
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
### Pico SDK aware Intellisense
|
||||||
|
|
||||||
|
For an IntelliSense that will be aware of Raspberry Pi Pico SDK dependencies, we will use [Clangd](https://clangd.llvm.org). Clangd is a C/C++ language server provided by the LLVM project. To Setup Clang as Intellisense engine follow instruction below:
|
||||||
|
|
||||||
|
1. To begin with, you need to install the server itself (Clangd is not installed by default in the SDK container image), to do this in the terminal call the command:
|
||||||
|
|
||||||
|
```
|
||||||
|
apk add clang-extra-tools
|
||||||
|
```
|
||||||
|
|
||||||
|
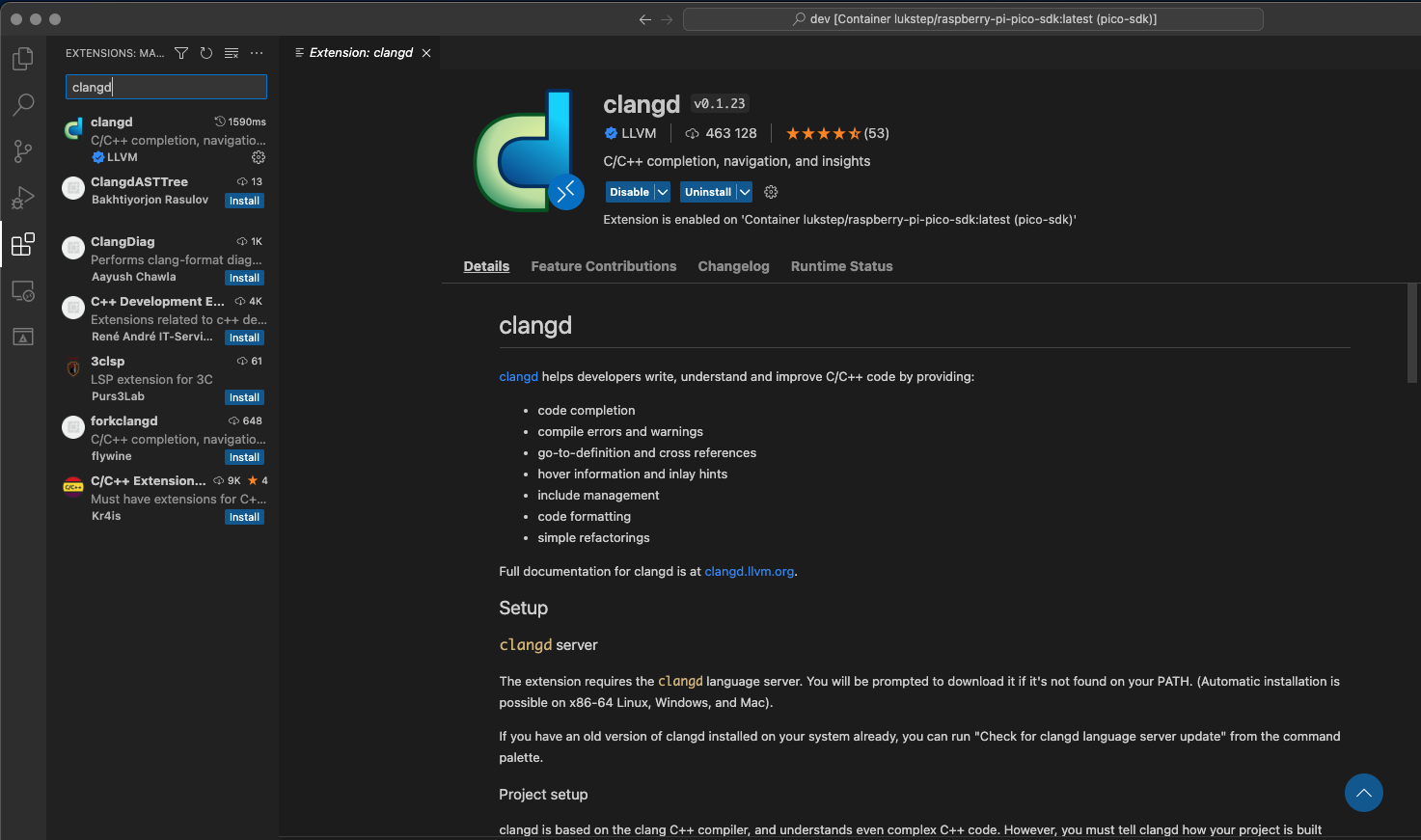
2. Next is needed to install the Visual Studio Code [Clangd extension](https://marketplace.visualstudio.com/items?itemName=llvm-vs-code-extensions.vscode-clangd).
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
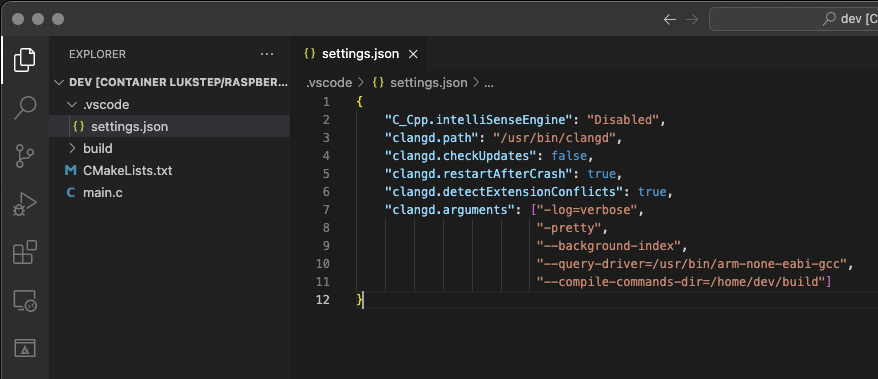
1. To set-up The Clangd extension, in the project root directory, create folder .vcode with file settings.json. To settings.json past configuration from the snippet below:
|
||||||
|
|
||||||
|
```json
|
||||||
|
{
|
||||||
|
"C_Cpp.intelliSenseEngine": "Disabled",
|
||||||
|
"clangd.path": "/usr/bin/clangd",
|
||||||
|
"clangd.checkUpdates": false,
|
||||||
|
"clangd.restartAfterCrash": true,
|
||||||
|
"clangd.detectExtensionConflicts": true,
|
||||||
|
"clangd.arguments": ["-log=verbose",
|
||||||
|
"-pretty",
|
||||||
|
"--background-index",
|
||||||
|
"--query-driver=/usr/bin/arm-none-eabi-gcc",
|
||||||
|
"--compile-commands-dir=/home/dev/build"]
|
||||||
|
}
|
||||||
|
```
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
4. For clangd to work, it needs a `compile_commands.json` file. This file contains the compilation and dependency information of each file in the project. To create it you need to add to the CMake command, `-DCMAKE_EXPORT_COMPILE_COMMANDS=1`. So You need to build your project with the command:
|
||||||
|
|
||||||
|
```
|
||||||
|
mkdir build
|
||||||
|
|
||||||
|
cd build
|
||||||
|
|
||||||
|
cmake -DCMAKE_EXPORT_COMPILE_COMMANDS=1 ..
|
||||||
|
|
||||||
|
make
|
||||||
|
```
|
||||||
|
|
||||||
|
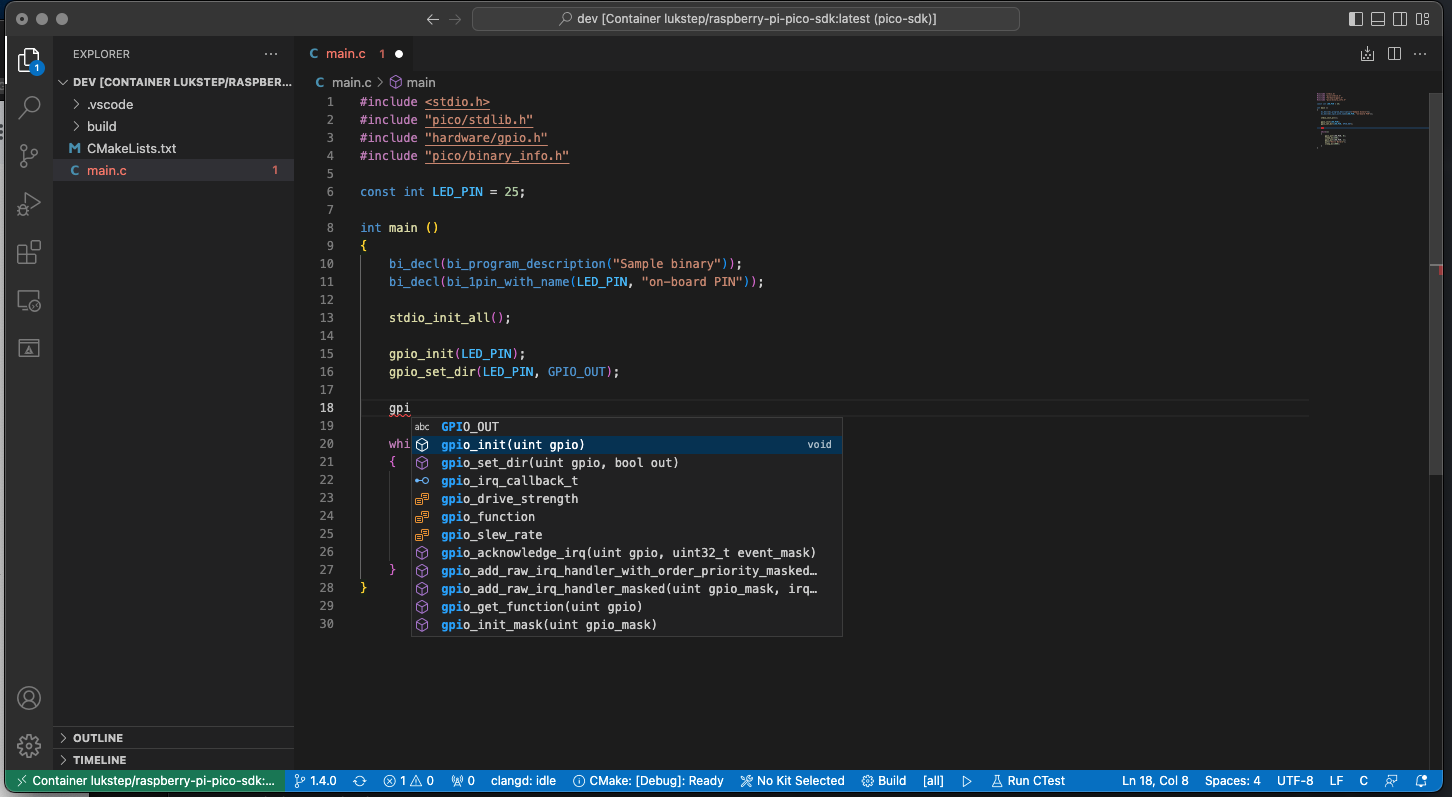
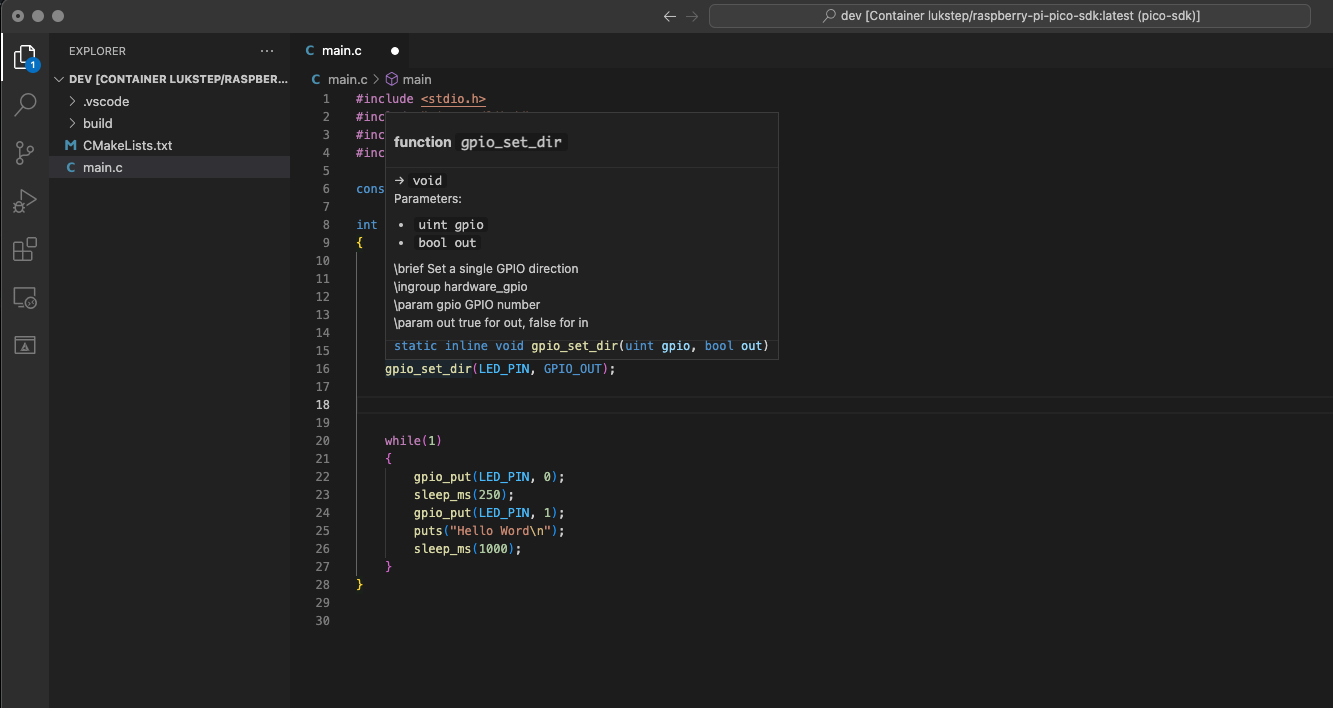
5. Now IntelliSense should work!. Now you should see a prompt when you start typing. If you hover your cursor over a function from the SDK you should see its documentation, You can go to the function definition by pressing F12.
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|||||||
31
freertos_test_project/CMakeLists.txt
Normal file
31
freertos_test_project/CMakeLists.txt
Normal file
@@ -0,0 +1,31 @@
|
|||||||
|
cmake_minimum_required(VERSION 3.13)
|
||||||
|
|
||||||
|
include($ENV{PICO_SDK_PATH}/external/pico_sdk_import.cmake)
|
||||||
|
include($ENV{FREERTOS_KERNEL_PATH}/portable/ThirdParty/GCC/RP2040/FreeRTOS_Kernel_import.cmake)
|
||||||
|
|
||||||
|
set(CMAKE_C_COMPILER /usr/bin/arm-none-eabi-gcc CACHE PATH "" FORCE)
|
||||||
|
set(CMAKE_CXX_COMPILER /usr/bin/arm-none-eabi-g++ CACHE PATH "" FORCE)
|
||||||
|
|
||||||
|
project(freertos_demo C CXX ASM)
|
||||||
|
|
||||||
|
set(CMAKE_C_STANDARD 11)
|
||||||
|
set(CMAKE_CXX_STANDARD 17)
|
||||||
|
|
||||||
|
pico_sdk_init()
|
||||||
|
|
||||||
|
add_library(FreeRTOS-Config INTERFACE)
|
||||||
|
target_include_directories(FreeRTOS-Config INTERFACE ${CMAKE_SOURCE_DIR}/config)
|
||||||
|
|
||||||
|
add_executable(freertos_demo main.cpp)
|
||||||
|
|
||||||
|
target_include_directories(freertos_demo PRIVATE ${CMAKE_CURRENT_LIST_DIR})
|
||||||
|
|
||||||
|
target_link_libraries(freertos_demo
|
||||||
|
pico_stdlib
|
||||||
|
FreeRTOS-Config
|
||||||
|
FreeRTOS-Kernel
|
||||||
|
FreeRTOS-Kernel-Heap4)
|
||||||
|
|
||||||
|
pico_enable_stdio_usb(freertos_demo 1)
|
||||||
|
pico_enable_stdio_uart(freertos_demo 1)
|
||||||
|
pico_add_extra_outputs(freertos_demo)
|
||||||
136
freertos_test_project/config/FreeRTOSConfig.h
Normal file
136
freertos_test_project/config/FreeRTOSConfig.h
Normal file
@@ -0,0 +1,136 @@
|
|||||||
|
/*
|
||||||
|
* FreeRTOS V202107.00
|
||||||
|
* Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
||||||
|
*
|
||||||
|
* Permission is hereby granted, free of charge, to any person obtaining a copy of
|
||||||
|
* this software and associated documentation files (the "Software"), to deal in
|
||||||
|
* the Software without restriction, including without limitation the rights to
|
||||||
|
* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
||||||
|
* the Software, and to permit persons to whom the Software is furnished to do so,
|
||||||
|
* subject to the following conditions:
|
||||||
|
*
|
||||||
|
* The above copyright notice and this permission notice shall be included in all
|
||||||
|
* copies or substantial portions of the Software.
|
||||||
|
*
|
||||||
|
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||||
|
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
||||||
|
* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
||||||
|
* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
||||||
|
* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
||||||
|
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
||||||
|
*
|
||||||
|
* http://www.FreeRTOS.org
|
||||||
|
* http://aws.amazon.com/freertos
|
||||||
|
*
|
||||||
|
* 1 tab == 4 spaces!
|
||||||
|
*/
|
||||||
|
|
||||||
|
#ifndef FREERTOS_CONFIG_H
|
||||||
|
#define FREERTOS_CONFIG_H
|
||||||
|
|
||||||
|
/*-----------------------------------------------------------
|
||||||
|
* Application specific definitions.
|
||||||
|
*
|
||||||
|
* These definitions should be adjusted for your particular hardware and
|
||||||
|
* application requirements.
|
||||||
|
*
|
||||||
|
* THESE PARAMETERS ARE DESCRIBED WITHIN THE 'CONFIGURATION' SECTION OF THE
|
||||||
|
* FreeRTOS API DOCUMENTATION AVAILABLE ON THE FreeRTOS.org WEB SITE.
|
||||||
|
*
|
||||||
|
* See http://www.freertos.org/a00110.html
|
||||||
|
*----------------------------------------------------------*/
|
||||||
|
|
||||||
|
/* Scheduler Related */
|
||||||
|
#define configUSE_PREEMPTION 1
|
||||||
|
#define configUSE_TICKLESS_IDLE 0
|
||||||
|
#define configUSE_IDLE_HOOK 0
|
||||||
|
#define configUSE_TICK_HOOK 1
|
||||||
|
#define configTICK_RATE_HZ ( ( TickType_t ) 1000 )
|
||||||
|
#define configMAX_PRIORITIES 32
|
||||||
|
#define configMINIMAL_STACK_SIZE ( configSTACK_DEPTH_TYPE ) 256
|
||||||
|
#define configUSE_16_BIT_TICKS 0
|
||||||
|
|
||||||
|
#define configIDLE_SHOULD_YIELD 1
|
||||||
|
|
||||||
|
/* Synchronization Related */
|
||||||
|
#define configUSE_MUTEXES 1
|
||||||
|
#define configUSE_RECURSIVE_MUTEXES 1
|
||||||
|
#define configUSE_APPLICATION_TASK_TAG 0
|
||||||
|
#define configUSE_COUNTING_SEMAPHORES 1
|
||||||
|
#define configQUEUE_REGISTRY_SIZE 8
|
||||||
|
#define configUSE_QUEUE_SETS 1
|
||||||
|
#define configUSE_TIME_SLICING 1
|
||||||
|
#define configUSE_NEWLIB_REENTRANT 0
|
||||||
|
#define configENABLE_BACKWARD_COMPATIBILITY 1
|
||||||
|
#define configNUM_THREAD_LOCAL_STORAGE_POINTERS 5
|
||||||
|
|
||||||
|
/* System */
|
||||||
|
#define configSTACK_DEPTH_TYPE uint32_t
|
||||||
|
#define configMESSAGE_BUFFER_LENGTH_TYPE size_t
|
||||||
|
|
||||||
|
/* Memory allocation related definitions. */
|
||||||
|
#define configSUPPORT_STATIC_ALLOCATION 0
|
||||||
|
#define configSUPPORT_DYNAMIC_ALLOCATION 1
|
||||||
|
#define configTOTAL_HEAP_SIZE (128*1024)
|
||||||
|
#define configAPPLICATION_ALLOCATED_HEAP 0
|
||||||
|
|
||||||
|
/* Hook function related definitions. */
|
||||||
|
#define configCHECK_FOR_STACK_OVERFLOW 2
|
||||||
|
#define configUSE_MALLOC_FAILED_HOOK 1
|
||||||
|
#define configUSE_DAEMON_TASK_STARTUP_HOOK 0
|
||||||
|
|
||||||
|
/* Run time and task stats gathering related definitions. */
|
||||||
|
#define configGENERATE_RUN_TIME_STATS 0
|
||||||
|
#define configUSE_TRACE_FACILITY 1
|
||||||
|
#define configUSE_STATS_FORMATTING_FUNCTIONS 0
|
||||||
|
|
||||||
|
/* Co-routine related definitions. */
|
||||||
|
#define configUSE_CO_ROUTINES 0
|
||||||
|
#define configMAX_CO_ROUTINE_PRIORITIES 1
|
||||||
|
|
||||||
|
/* Software timer related definitions. */
|
||||||
|
#define configUSE_TIMERS 1
|
||||||
|
#define configTIMER_TASK_PRIORITY ( configMAX_PRIORITIES - 1 )
|
||||||
|
#define configTIMER_QUEUE_LENGTH 10
|
||||||
|
#define configTIMER_TASK_STACK_DEPTH 1024
|
||||||
|
|
||||||
|
/* Interrupt nesting behaviour configuration. */
|
||||||
|
/*
|
||||||
|
#define configKERNEL_INTERRUPT_PRIORITY [dependent of processor]
|
||||||
|
#define configMAX_SYSCALL_INTERRUPT_PRIORITY [dependent on processor and application]
|
||||||
|
#define configMAX_API_CALL_INTERRUPT_PRIORITY [dependent on processor and application]
|
||||||
|
*/
|
||||||
|
|
||||||
|
/* SMP port only */
|
||||||
|
#define configNUM_CORES 2
|
||||||
|
#define configTICK_CORE 0
|
||||||
|
#define configRUN_MULTIPLE_PRIORITIES 1
|
||||||
|
#define configSUPPORT_PICO_SYNC_INTEROP 1
|
||||||
|
#define configSUPPORT_PICO_TIME_INTEROP 1
|
||||||
|
|
||||||
|
#include <assert.h>
|
||||||
|
/* Define to trap errors during development. */
|
||||||
|
#define configASSERT(x) assert(x)
|
||||||
|
|
||||||
|
/* Set the following definitions to 1 to include the API function, or zero
|
||||||
|
to exclude the API function. */
|
||||||
|
#define INCLUDE_vTaskPrioritySet 1
|
||||||
|
#define INCLUDE_uxTaskPriorityGet 1
|
||||||
|
#define INCLUDE_vTaskDelete 1
|
||||||
|
#define INCLUDE_vTaskSuspend 1
|
||||||
|
#define INCLUDE_vTaskDelayUntil 1
|
||||||
|
#define INCLUDE_vTaskDelay 1
|
||||||
|
#define INCLUDE_xTaskGetSchedulerState 1
|
||||||
|
#define INCLUDE_xTaskGetCurrentTaskHandle 1
|
||||||
|
#define INCLUDE_uxTaskGetStackHighWaterMark 1
|
||||||
|
#define INCLUDE_xTaskGetIdleTaskHandle 1
|
||||||
|
#define INCLUDE_eTaskGetState 1
|
||||||
|
#define INCLUDE_xTimerPendFunctionCall 1
|
||||||
|
#define INCLUDE_xTaskAbortDelay 1
|
||||||
|
#define INCLUDE_xTaskGetHandle 1
|
||||||
|
#define INCLUDE_xTaskResumeFromISR 1
|
||||||
|
#define INCLUDE_xQueueGetMutexHolder 1
|
||||||
|
|
||||||
|
/* A header file that defines trace macro can be included here. */
|
||||||
|
|
||||||
|
#endif /* FREERTOS_CONFIG_H */
|
||||||
41
freertos_test_project/main.cpp
Normal file
41
freertos_test_project/main.cpp
Normal file
@@ -0,0 +1,41 @@
|
|||||||
|
#include "FreeRTOS.h"
|
||||||
|
#include "task.h"
|
||||||
|
#include <stdio.h>
|
||||||
|
#include "pico/stdlib.h"
|
||||||
|
#include "hardware/gpio.h"
|
||||||
|
|
||||||
|
#ifdef __cplusplus
|
||||||
|
extern "C" {
|
||||||
|
void vApplicationStackOverflowHook( TaskHandle_t pxTask, char *pcTaskName );
|
||||||
|
void vApplicationTickHook( void );
|
||||||
|
void vApplicationMallocFailedHook( void );
|
||||||
|
}
|
||||||
|
#endif
|
||||||
|
|
||||||
|
void vApplicationStackOverflowHook( TaskHandle_t pxTask, char *pcTaskName ) {}
|
||||||
|
void vApplicationTickHook( void ) {}
|
||||||
|
void vApplicationMallocFailedHook( void ) {}
|
||||||
|
|
||||||
|
constexpr int LED_PIN = 25;
|
||||||
|
|
||||||
|
void vBlink(void* unused_arg) {
|
||||||
|
stdio_init_all();
|
||||||
|
for (;;) {
|
||||||
|
|
||||||
|
gpio_put(LED_PIN, 1);
|
||||||
|
vTaskDelay(250);
|
||||||
|
gpio_put(LED_PIN, 0);
|
||||||
|
puts("Hello FreeRTOS\n");
|
||||||
|
vTaskDelay(250);
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
int main() {
|
||||||
|
gpio_init(LED_PIN);
|
||||||
|
|
||||||
|
gpio_set_dir(LED_PIN, GPIO_OUT);
|
||||||
|
|
||||||
|
xTaskCreate(vBlink, "Blink", 128, NULL, 1, NULL);
|
||||||
|
|
||||||
|
vTaskStartScheduler();
|
||||||
|
}
|
||||||
@@ -4,6 +4,9 @@ include($ENV{PICO_SDK_PATH}/external/pico_sdk_import.cmake)
|
|||||||
|
|
||||||
project(sample C CXX ASM)
|
project(sample C CXX ASM)
|
||||||
|
|
||||||
|
set(CMAKE_C_COMPILER /usr/bin/arm-none-eabi-gcc CACHE PATH "" FORCE)
|
||||||
|
set(CMAKE_CXX_COMPILER /usr/bin/arm-none-eabi-g++ CACHE PATH "" FORCE)
|
||||||
|
|
||||||
set(CMAKE_C_STANDARD 11)
|
set(CMAKE_C_STANDARD 11)
|
||||||
set(CMAKE_CXX_STANDARD 17)
|
set(CMAKE_CXX_STANDARD 17)
|
||||||
|
|
||||||
15
test_sdk.sh
Normal file
15
test_sdk.sh
Normal file
@@ -0,0 +1,15 @@
|
|||||||
|
if [[ -z $1 ]]; then
|
||||||
|
echo "Please provide an SDK image you want to test"
|
||||||
|
fi
|
||||||
|
|
||||||
|
docker run -d -it --name pico-sdk --mount type=bind,source=${PWD}/test_poject,target=/home/dev $1
|
||||||
|
docker exec pico-sdk /bin/sh -c "cd /home/dev && mkdir build && cd build && cmake .. && make -j4"
|
||||||
|
docker exec pico-sdk /bin/sh -c "picotool"
|
||||||
|
docker container kill pico-sdk
|
||||||
|
docker container rm pico-sdk
|
||||||
|
|
||||||
|
docker run -d -it --name pico-sdk --mount type=bind,source=${PWD}/freertos_test_project,target=/home/dev $1
|
||||||
|
docker exec pico-sdk /bin/sh -c "cd /home/dev && mkdir build && cd build && cmake .. && make -j4"
|
||||||
|
docker exec pico-sdk /bin/sh -c "picotool"
|
||||||
|
docker container kill pico-sdk
|
||||||
|
docker container rm pico-sdk
|
||||||
Reference in New Issue
Block a user